


Contents
System model
The transfer function from the gear angle ( ) to the ball position (
) to the ball position ( ), as derived in the Ball & Beam: System Modeling page.
), as derived in the Ball & Beam: System Modeling page.
(1)![$$ P(s) = \frac{R(s)}{\Theta(s)} = -\frac{mgd}{L \left(\frac{J}{R^2}+m\right)}
\frac{1}{s^2} \qquad [ \frac{m}{rad} ]$$](Content/BallBeam/System/Analysis/html/BallBeam_SystemAnalysis_eq13603407618401410760.png)
Open a new m-file and add the following code to create a transfer function model in MATLAB.
m = 0.111;
R = 0.015;
g = -9.8;
L = 1.0;
d = 0.03;
J = 9.99e-6;
s = tf('s');
P_ball = -m*g*d/L/(J/R^2+m)/s^2
P_ball = 0.21 ---- s^2 Continuous-time transfer function.
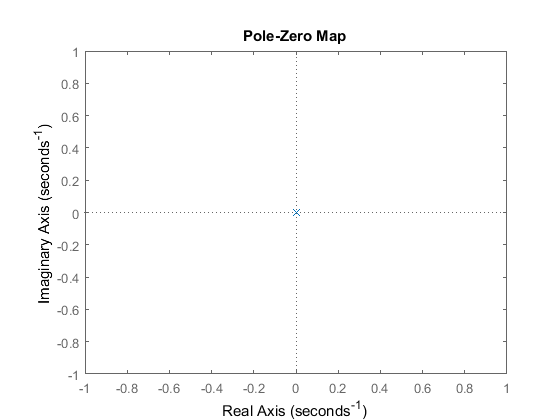
Pole/zero map
The Ball and Beam system is a type II system which has two poles at the origin, as seen in the pole/zero map below. Since the poles are not strictly in the left half plane, the open loop system will be unstable as seen in the step response below.
pzmap(P_ball)
Open-loop step response
Now, we would like to observe the ball's response to a step input on the motor servo gear angle  (1-radian step). To do this you will need to add the following line to your m-file.
(1-radian step). To do this you will need to add the following line to your m-file.
step(P_ball)
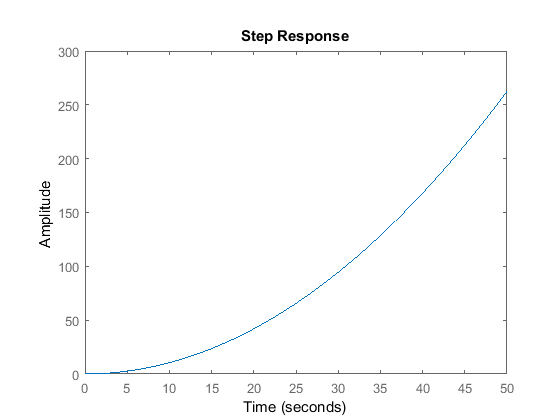
From this plot it is clear that the system is unstable in open-loop causing the ball to roll right off the end of the beam. Therefore, some method of controlling the ball's position in this system is required. Several examples of controller design are provided in these tutorials to address this problem.
